当其中一个发动机失效时,如何让无人机继续飞行?
来源:尖兵之翼
|
作者:高博特军工
|
发布时间: 2021-01-15
|
4267 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
瑞士苏黎世大学(UZH)与荷兰代尔夫特理工大学找到了一个方法,让无人机在一个旋翼突然失效后,可以利用机载摄像头的信息在空中继续自主飞行......
近日,瑞士苏黎世大学(UZH)与荷兰代尔夫特理工大学找到了一个方法,让无人机在一个旋翼突然失效后,可以利用机载摄像头的信息在空中继续自主飞行。在一个旋翼突然失效后,可以利用机载摄像头的信息来稳定无人机,让它在空中继续自主飞行。技术苏黎世大学机器人和感知小组负责人 Davide Scaramuzza 表示:“当一个旋翼发生故障时,无人机就会像芭蕾舞演员一样开始自旋。这种高速旋转运动会导致标准控制器失效,除非无人机能够获得非常精确的位置测量信息。”换句话说,一旦开始自旋,无人机就无法再评估其在空间中的位置,最终坠毁。
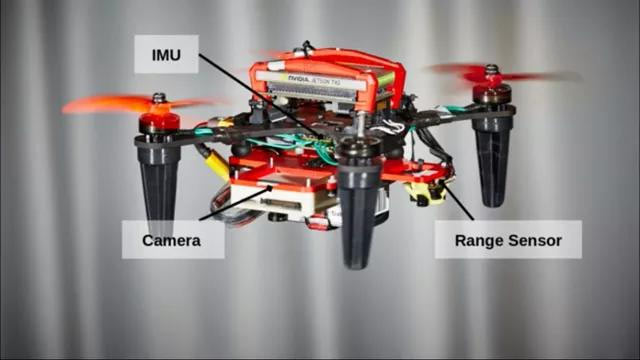
解决这个问题的方法之一是采用来自不同种机载摄像头的可视信息,研究人员为他们的四旋翼飞行器配备了两种摄像头:标准摄像头和事件摄像头,前者以固定速率每秒记录几次图像,后者基于独立的像素,这些像素只有当它们检测到到达它们的光线变化时才会被激活。研究团队开发的算法结合了两个传感器的信息,并利用它来跟踪四旋翼飞行器相对于周围环境的位置。这使得机载计算机能够在只有三个旋翼的无人机飞行以及自旋时控制它。
敬请关注“尖兵之翼”(始于2006年)中国无人机大会暨展览会
|