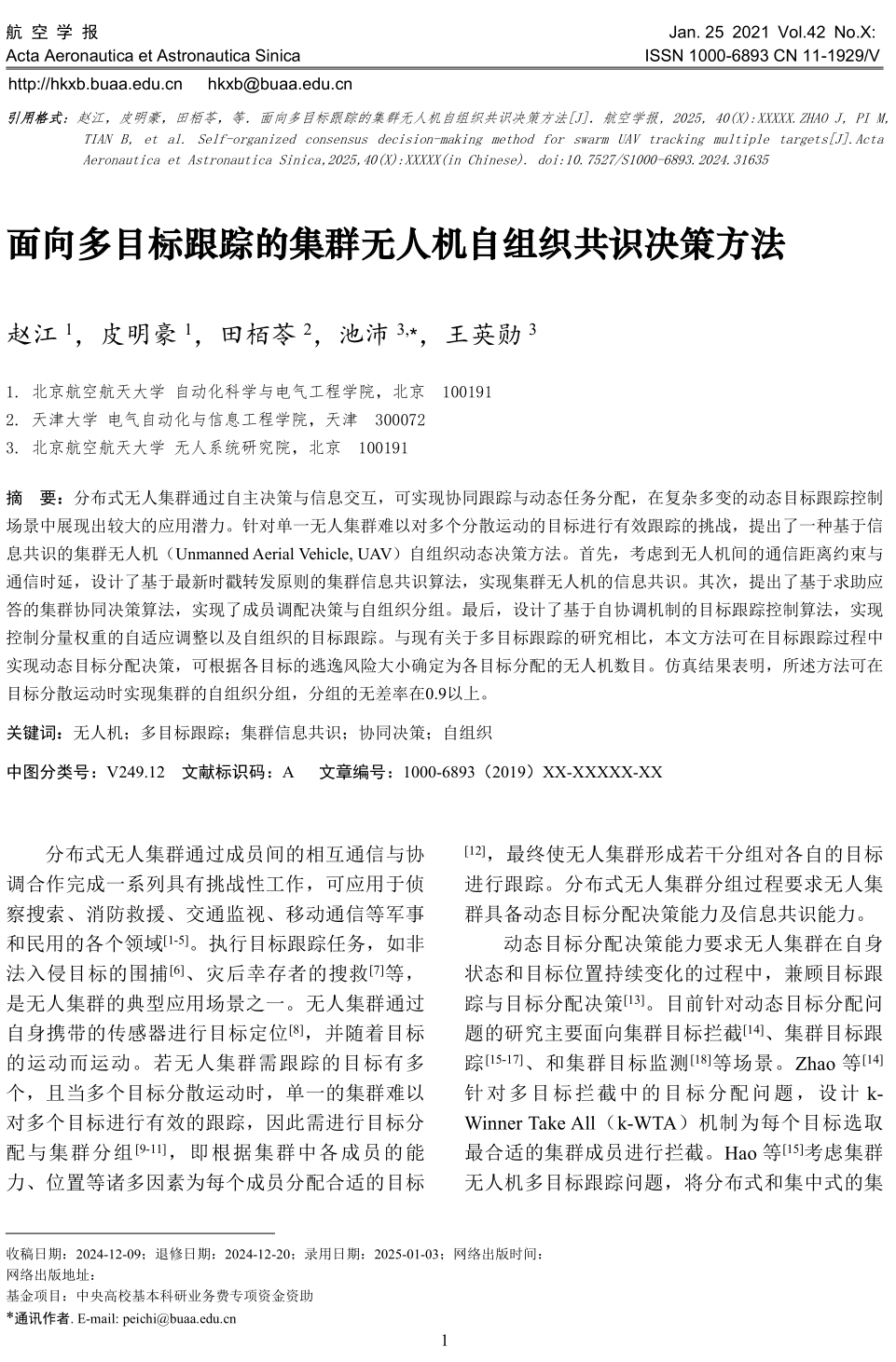
北航新闻网8月20日电(通讯员 易智恒)日前,北京航空航天大学无人系统研究院王英勋教授团队在《航空学报》期刊发表了封面文章,题为《面向多目标跟踪的集群无人机自组织共识决策方法》。提出了集群无人机自组织共识决策方法,将集群成员间的信息交互与共识、目标分配决策紧密耦合,确保各无人机对任务态势形成共识,动态决策每架无人机的最优跟踪对象,实现集群的自组织分组、各分组规模的灵活动态调整,增强了无人机集群在多目标跟踪任务下的自组织协同能力。论文由赵江、皮明豪、田栢苓、池沛和王英勋共同完成,王英勋教授为团队带头人,池沛教授为通信作者。
无人集群在公共安全、灾害救援、交通管理等众多领域扮演着重要角色。在应急救援中的目标搜寻等复杂应用场景中,存在着分散且快速变化的任务或目标,单一无人集群往往难以胜任这种任务需求,因此需进行目标分配与集群分组。现有关于目标分配方法的研究通常采取理想化假设,面临着决策响应慢、难以实时协同分工、对通信延迟和距离敏感等痛点,无法有效应对多目标动态变化场景下对于多目标的追踪问题。
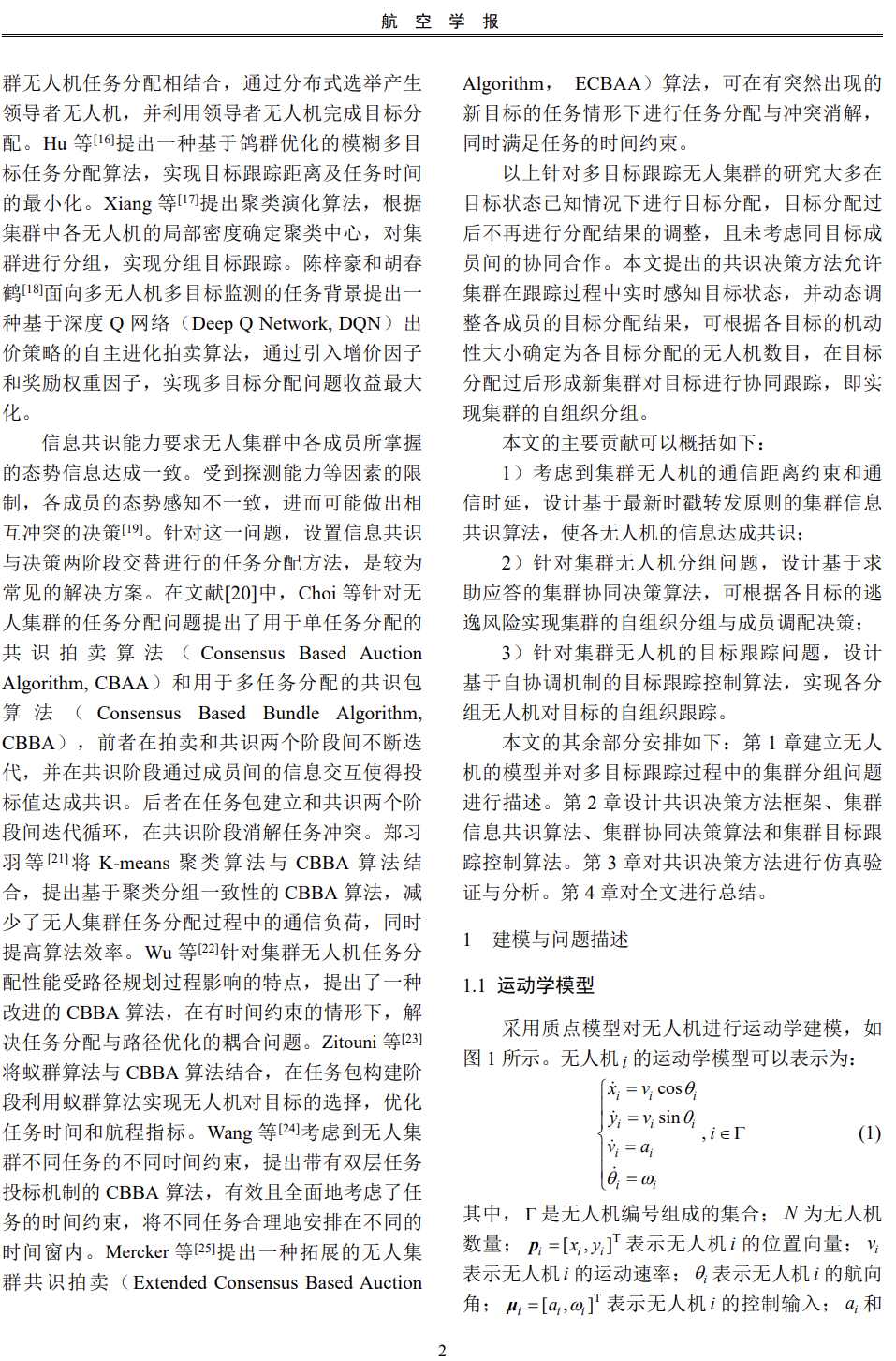
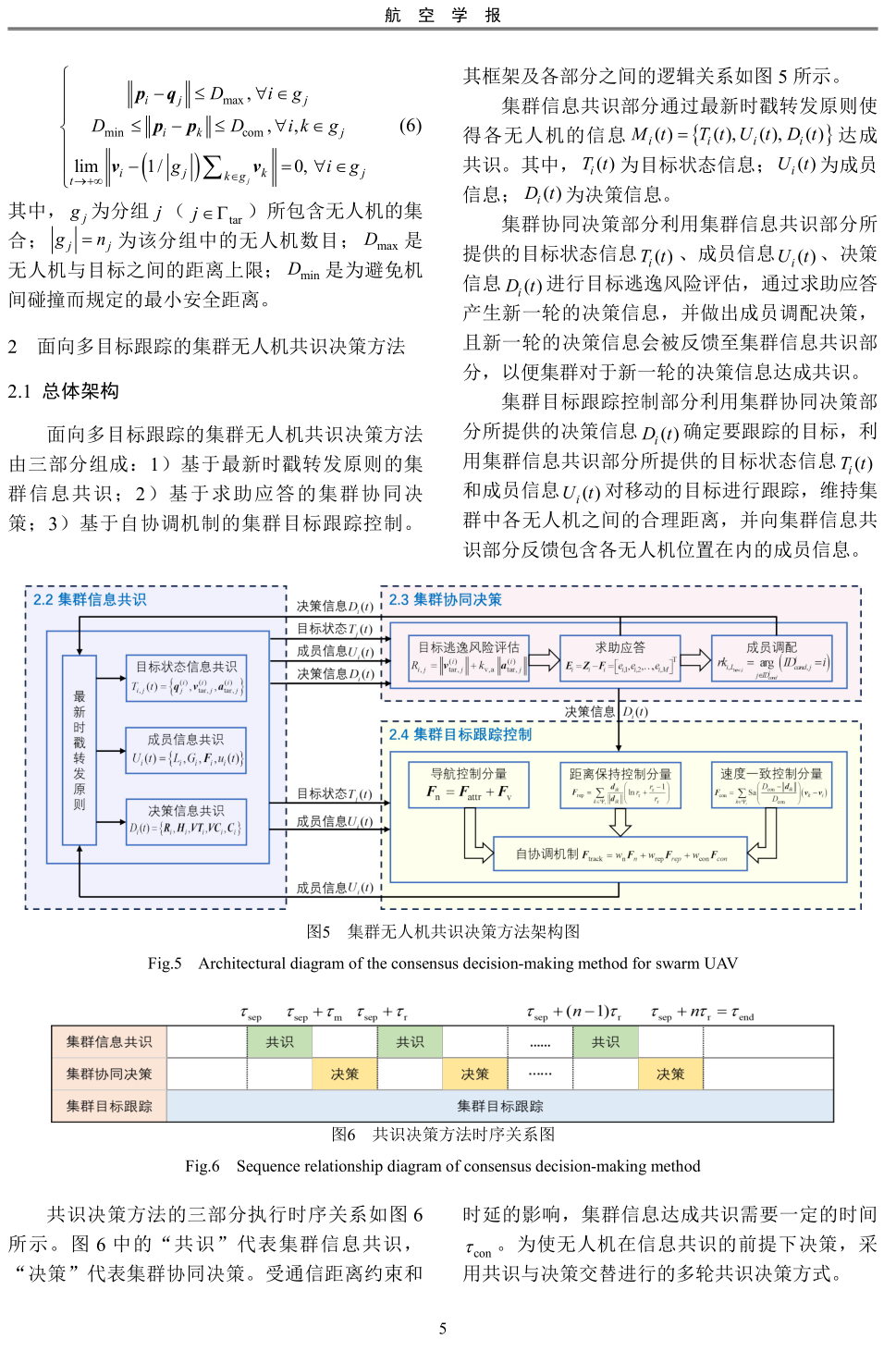
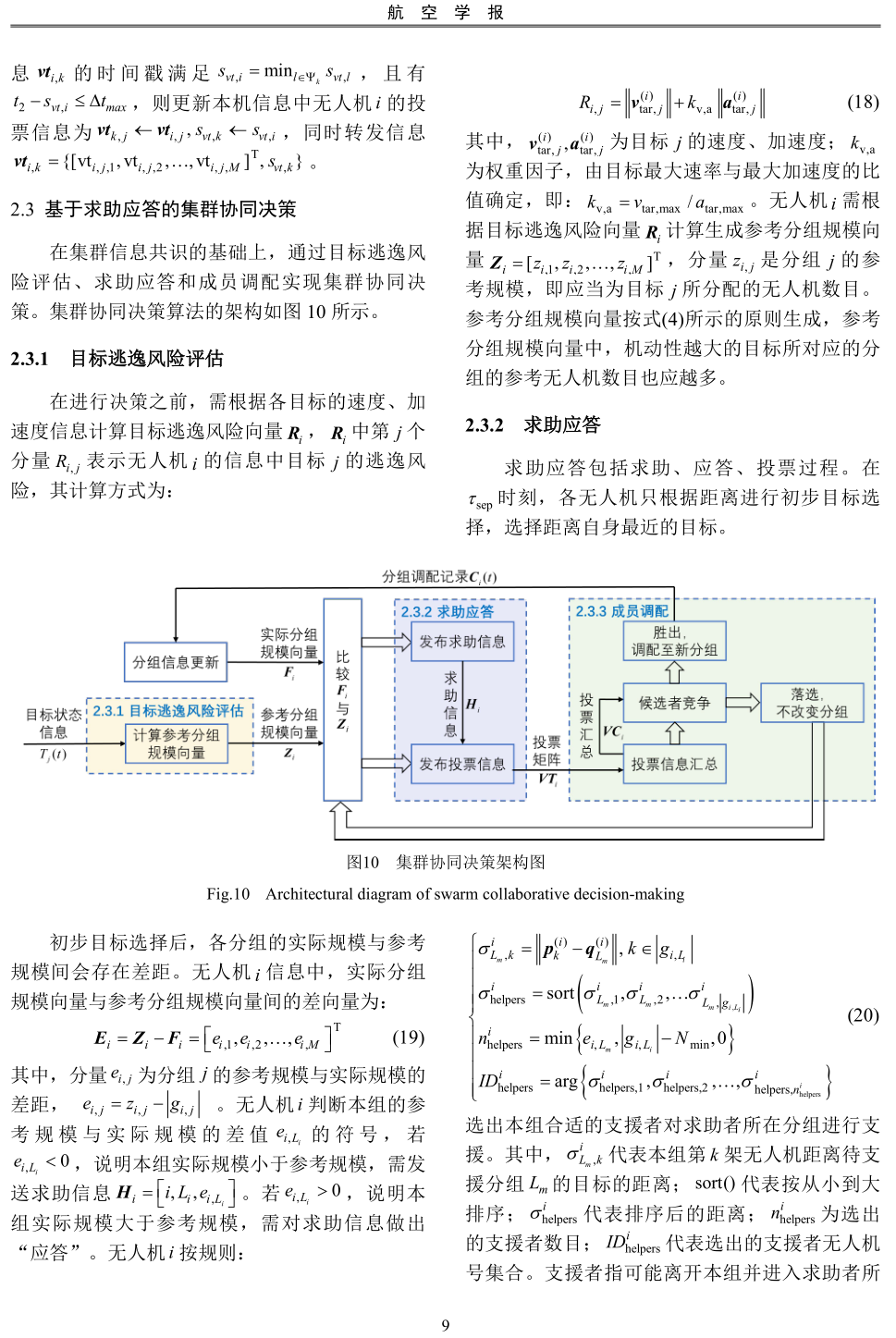
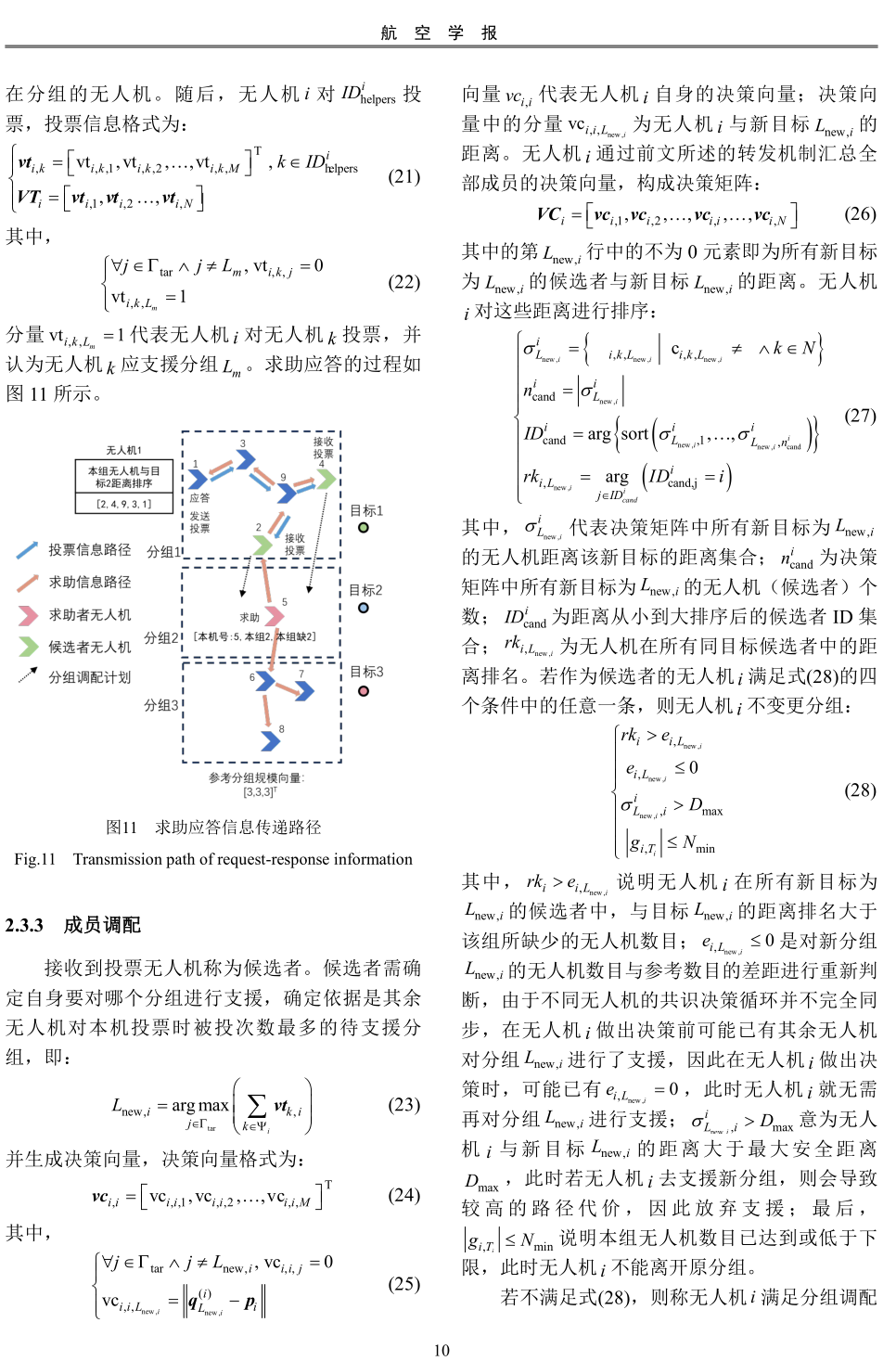
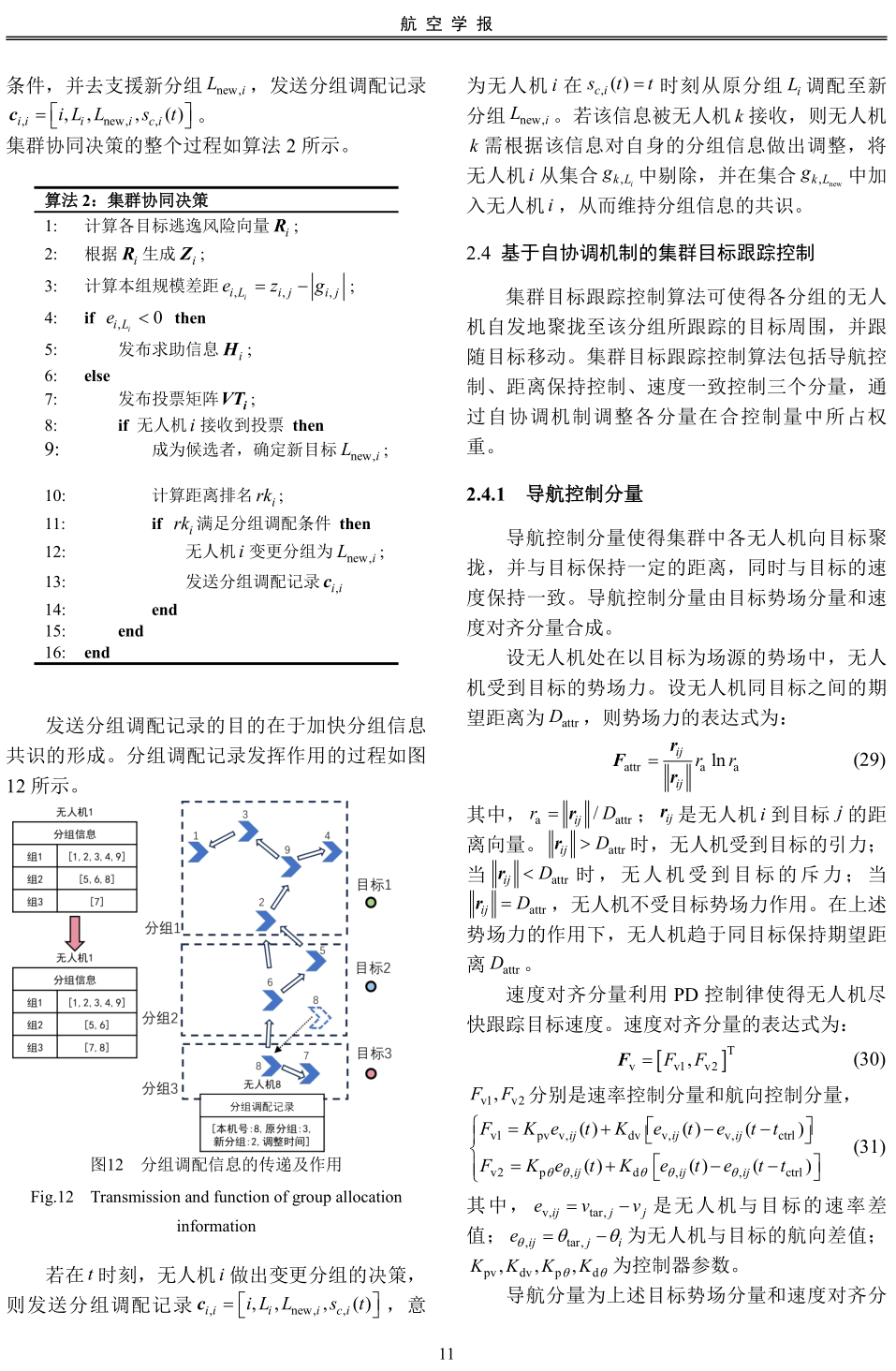
针对现有集群无人机目标分配方法在实时协同决策与调配方面的不足,本文提出了一种面向多目标跟踪的集群无人机自组织共识决策方法。该方法基于分布式架构,通过集群内部的信息动态共享,实现无人机个体间的信息共识和基于信息共识的自主协同决策。整体架构包括3大关键模块:集群信息共识、集群协同决策与集群目标跟踪控制。
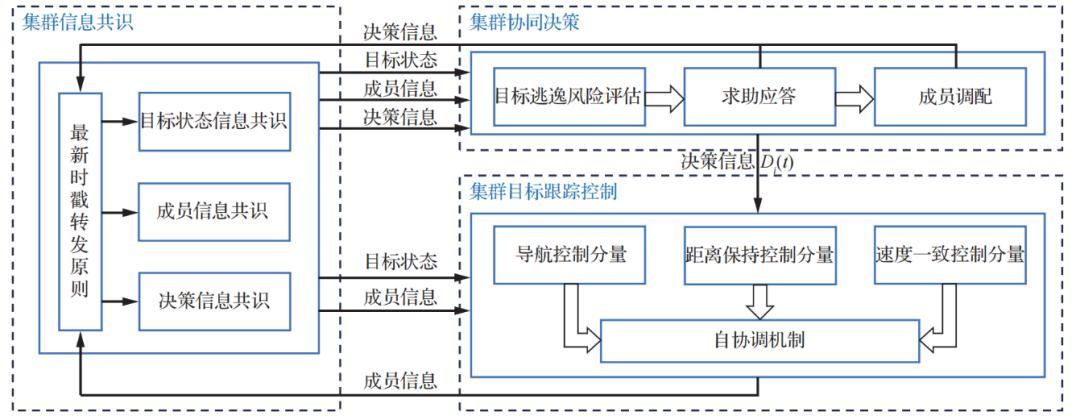
集群无人机共识决策方法架构图
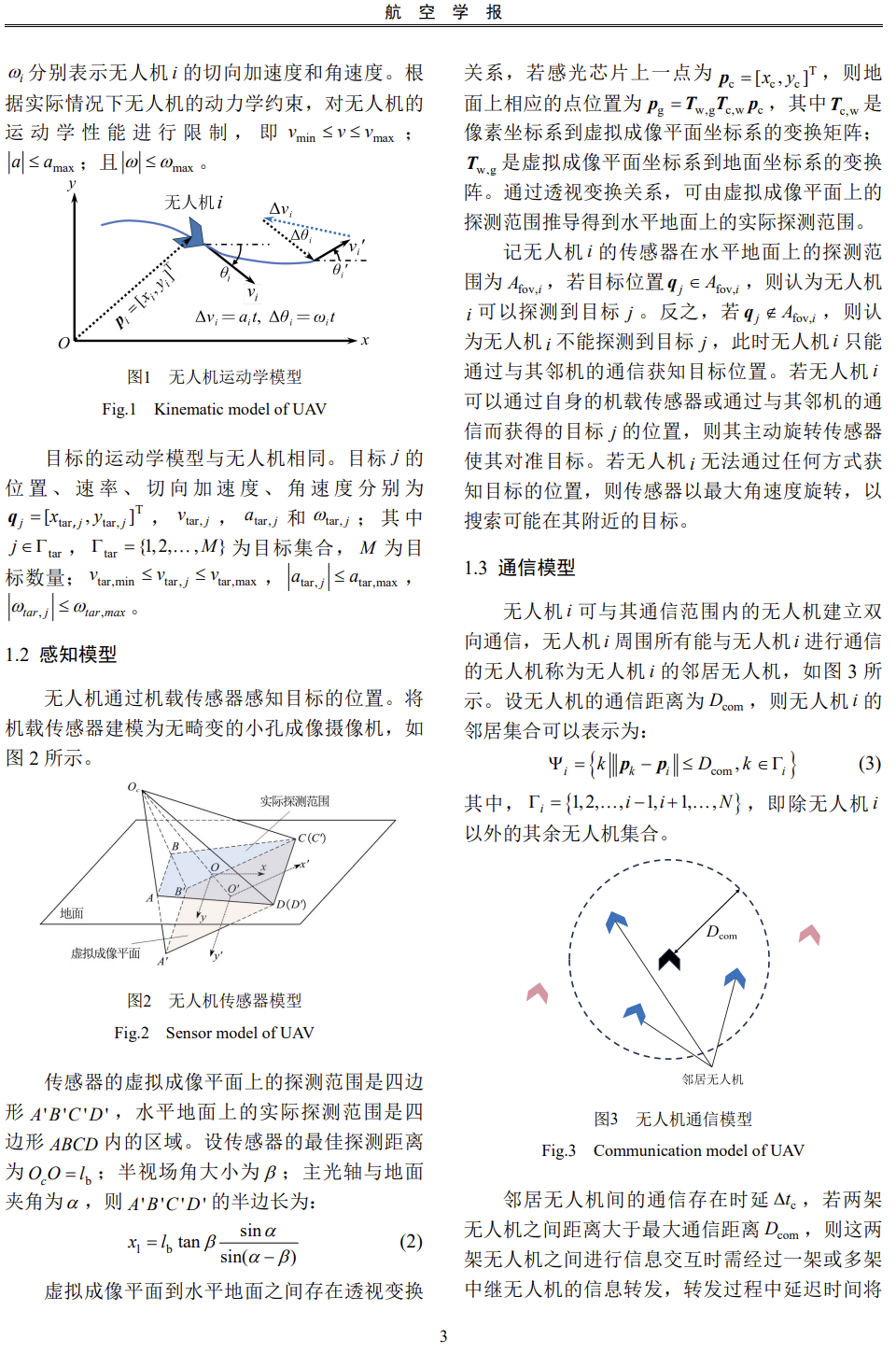
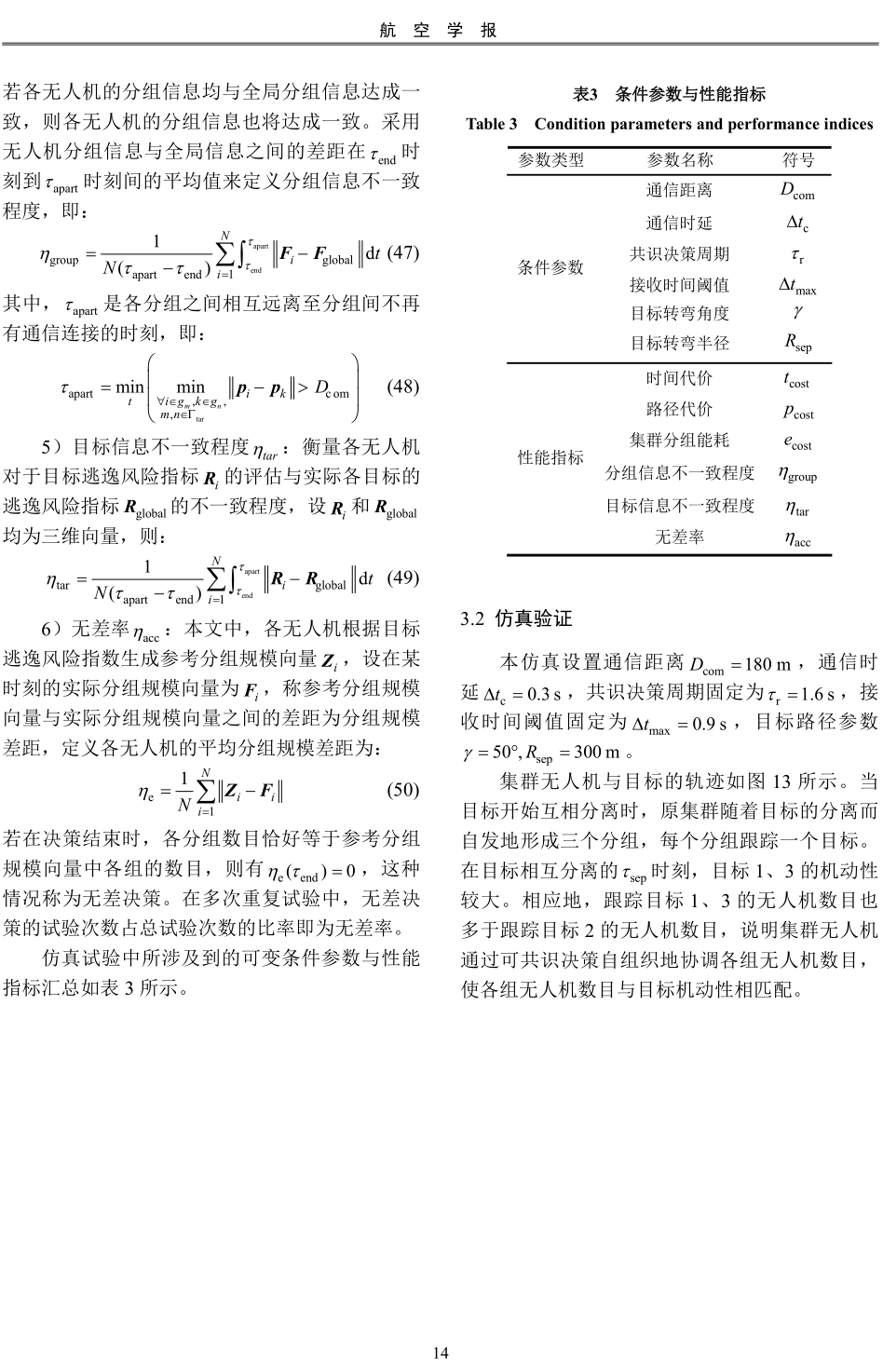
本文提出的方法可在目标跟踪过程中实现动态目标分配决策,可根据各目标的逃逸风险大小确定为各目标分配的无人机数目。在MATLAB仿真环境中,模拟由12架无人机组成的集群对3个地面移动目标进行跟踪。
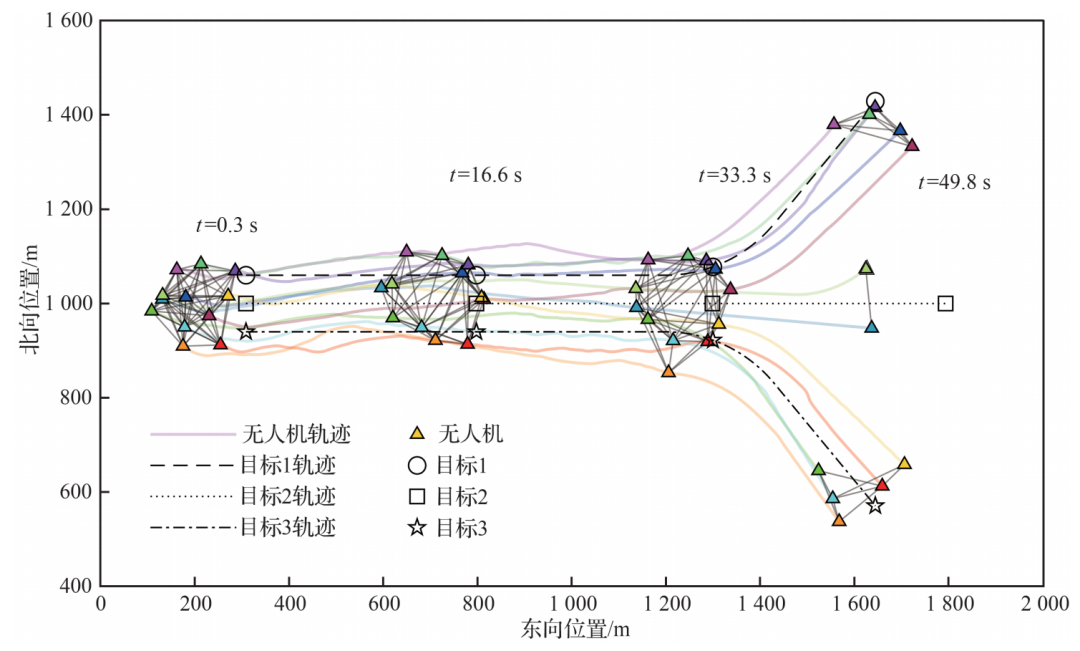
集群无人机与目标轨迹
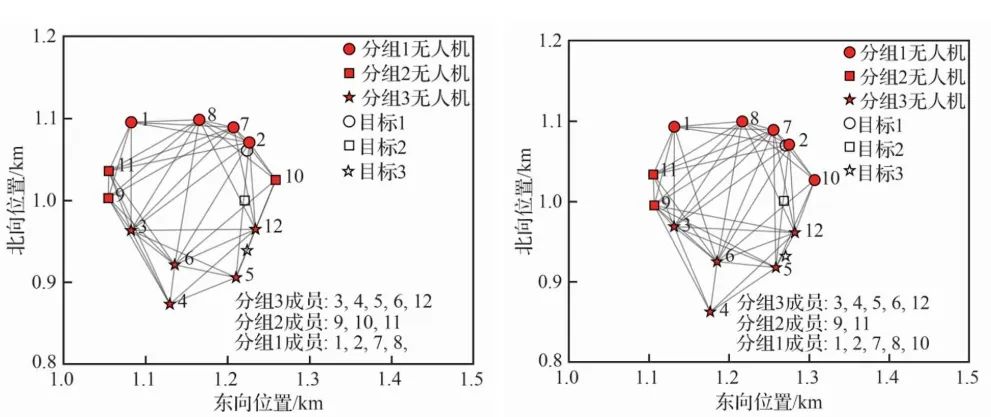
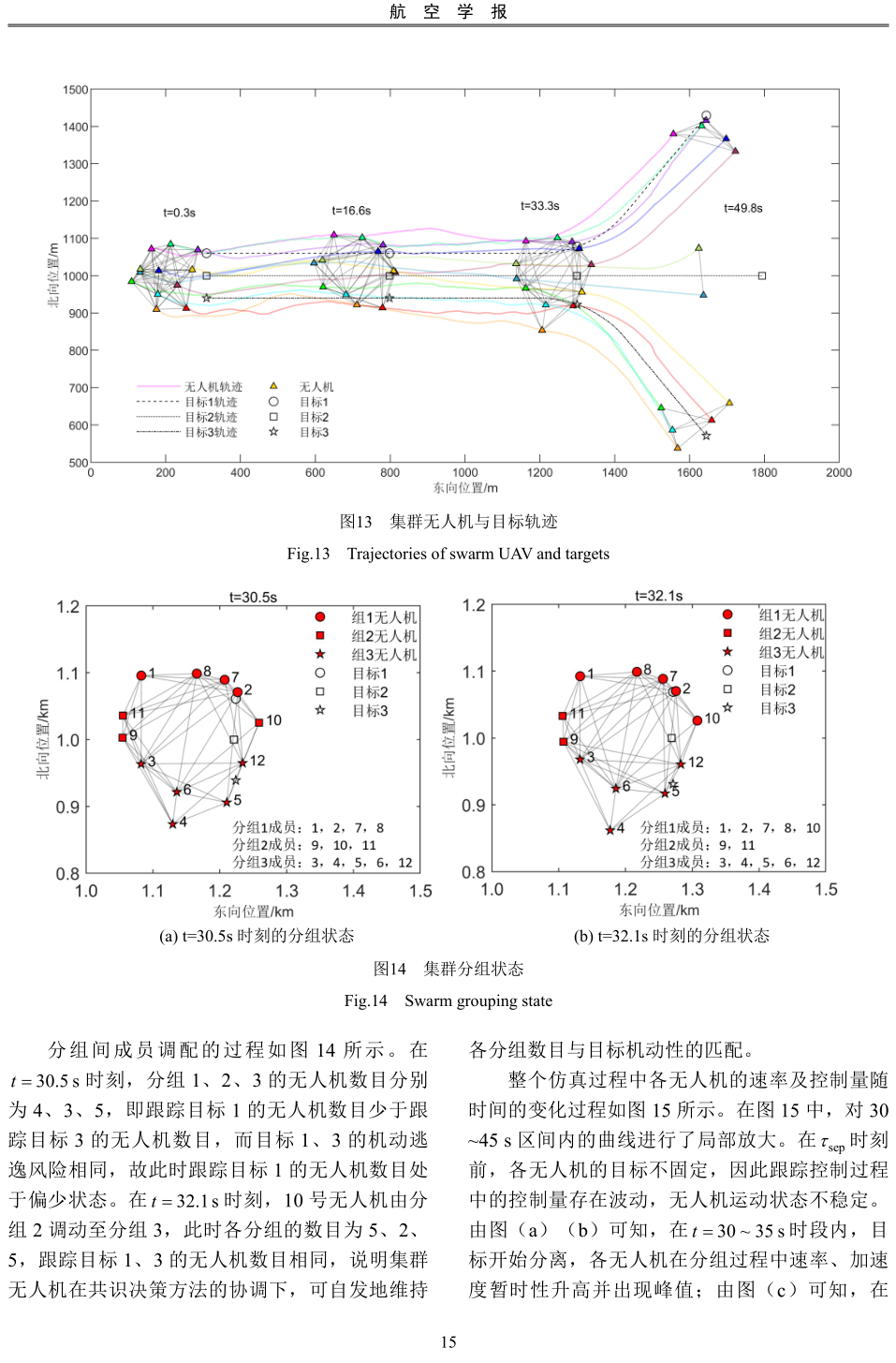
集群分组状态
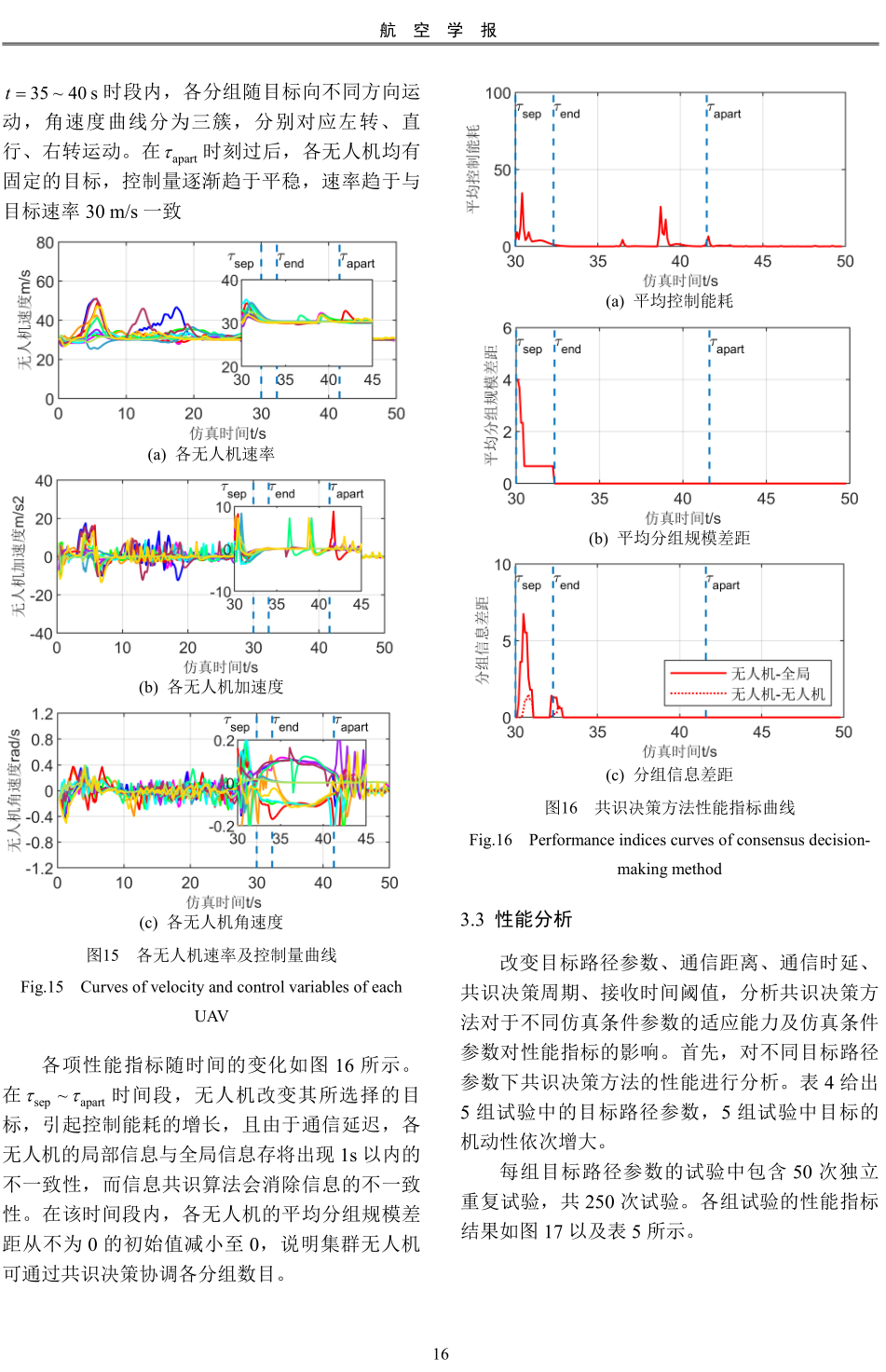
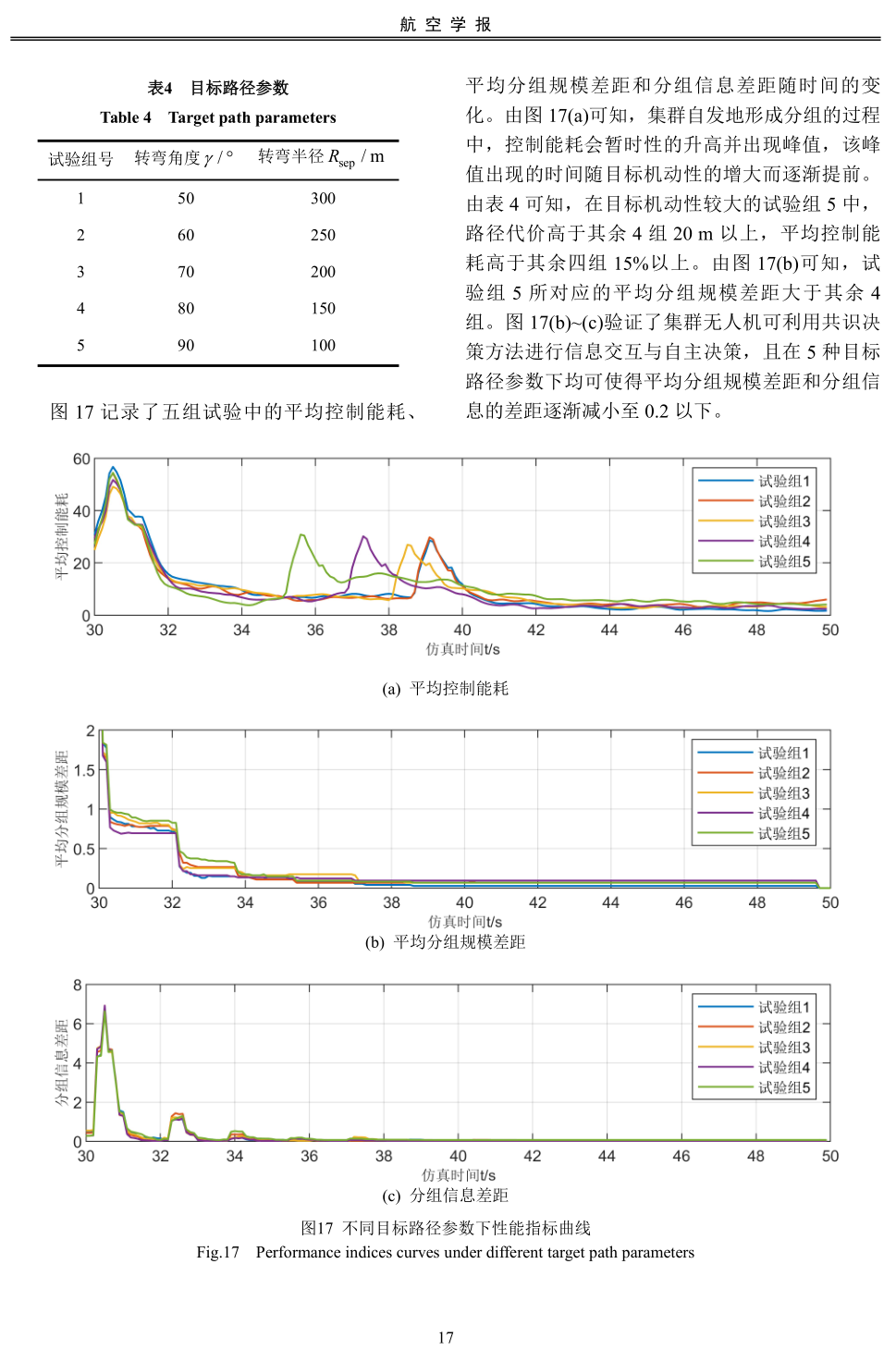
研究结果表明,所提出的共识决策方法可在多目标分离运动的场景下实现集群的自组织分组,适用于集群无人机跟踪多个分散运动目标的场景。算法对目标的机动以及条件参数的变化具有适应性,共识决策机制在其能力边界内可保持无差率在0.9左右。
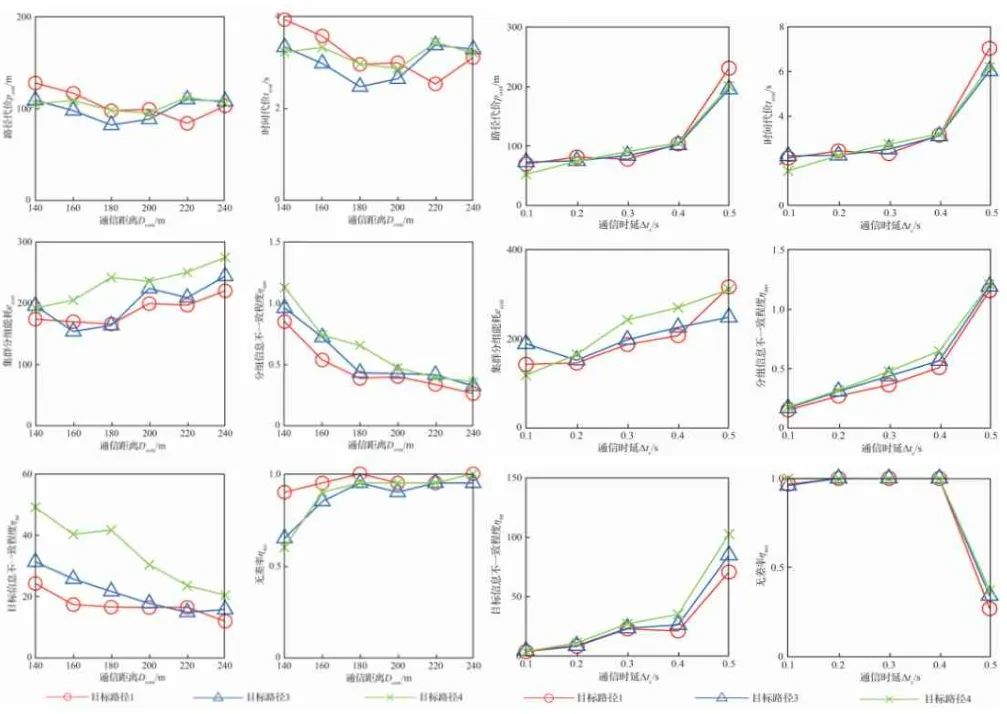
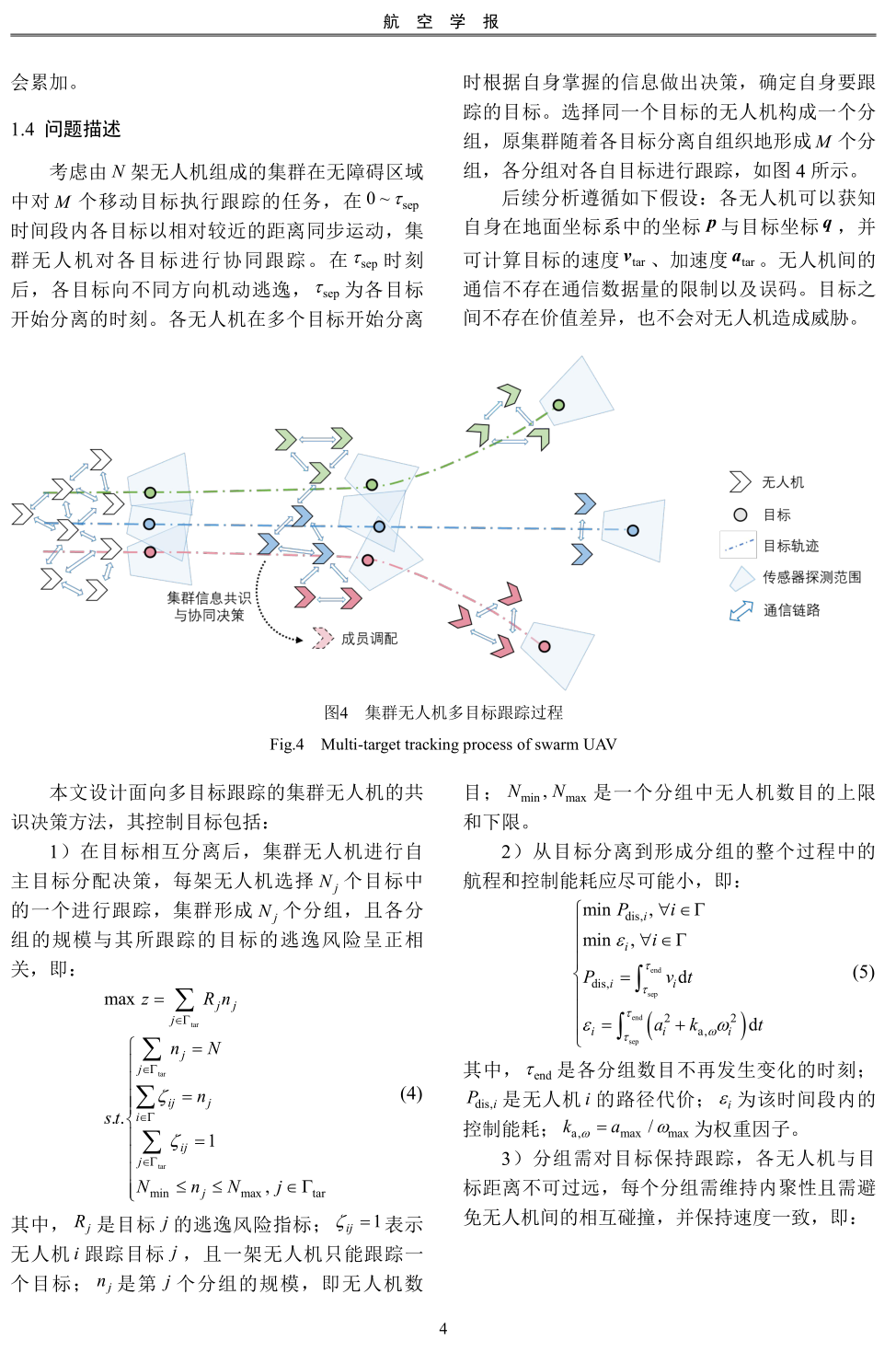
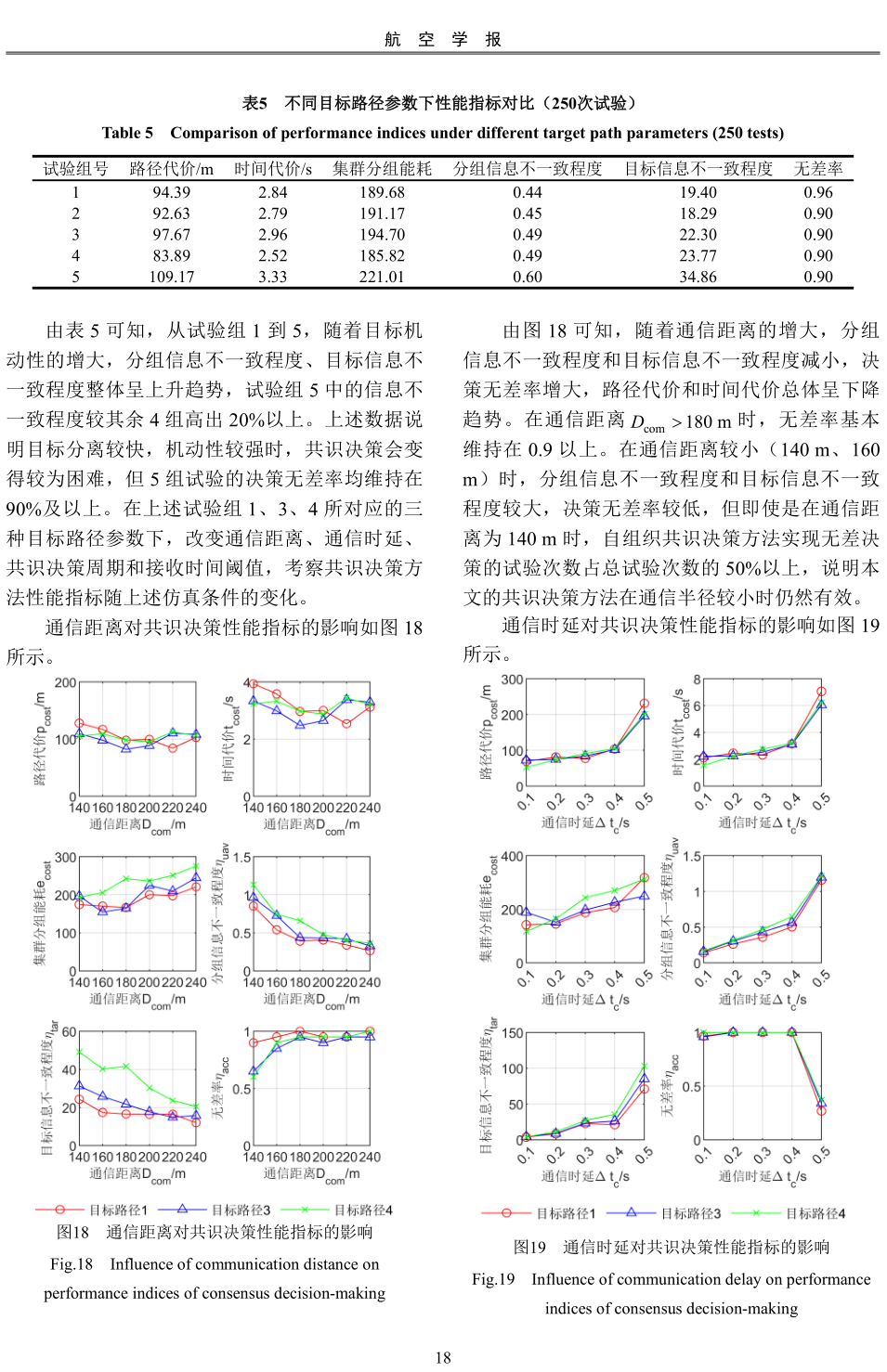
通信距离对共识决策性能指标的影响和通信时延对共识决策性能指标的影响
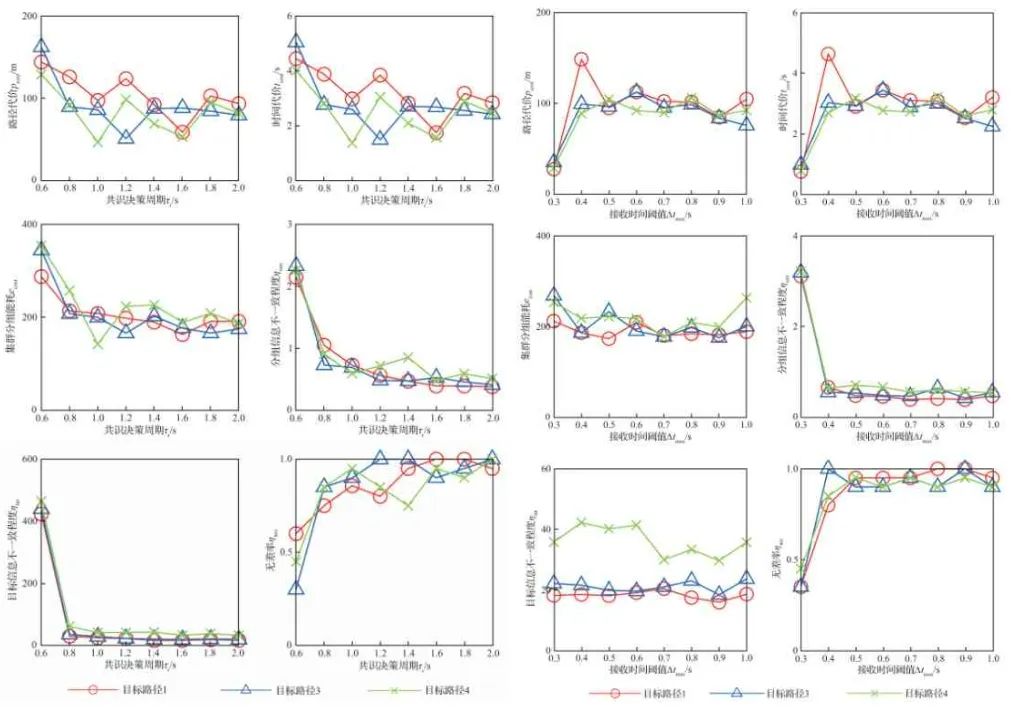
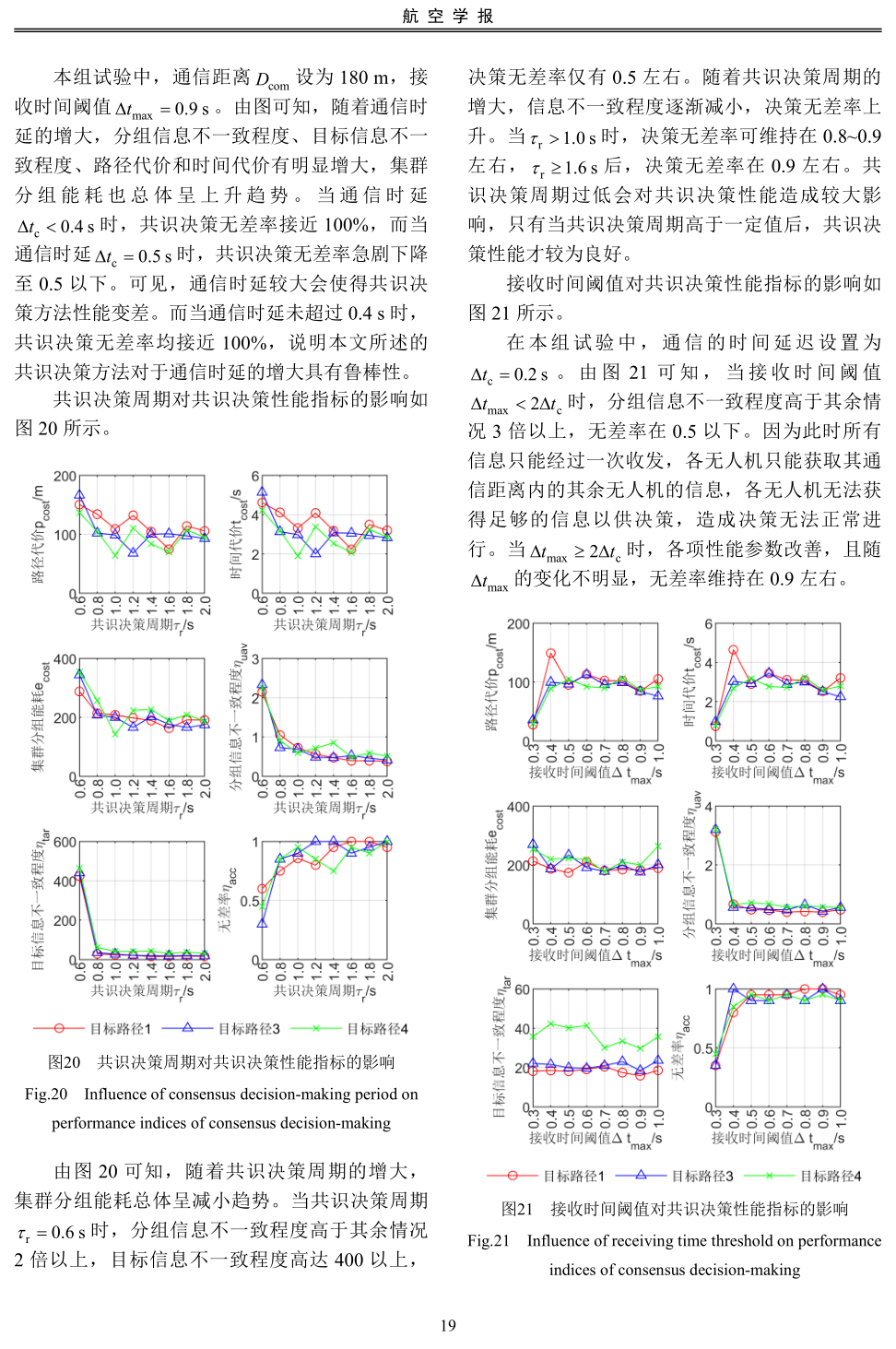
共识决策周期对共识决策性能指标的影响和接收时间阈值对共识决策性能指标的影响
论文原文链接:https://hkxb.buaa.edu.cn/CN/10.7527/S1000-6893.2024.31635
文章原文:
本文来源:北航新闻网
以上内容为高博特编辑选取的热点新闻,尊重原创,如有侵权请联系删除。
—————— 特别关注 ——————
让科技更好地赋能产业,“尖兵之翼”永不落幕。高博特自2006年发起、策划、投资、组织,在相关专业机构支持下成功举办了最早的无人机主题会展活动——“尖兵之翼中国无人机大会暨展览会”后持续推动无人机技术交流。高博特创新引领最早在深圳、上海、郑州等地发起举办无人系统会展赛飞活动,有力促进了我国无人系统整体技术进步和产业发展。
20年来,高博特始终坚持让科技更好地赋能产业的愿景;努力为行业企业搭建产业链高端交流平台,为科技转化为生产力服务。具体业务范围涵盖:信息情报、媒介传播、会展活动、招商加盟、品牌提升、咨询服务、产品中心等七大服务体系,长期服务于“军转民、民参军、军民融合”等国家战略。
以上内容为高博特编辑选取的热点新闻,尊重原创,如有侵权请联系删除。